DOBOT MG400 MODBUS模板
介绍
制造商:深圳市越疆科技股份有限公司
产品名称:超小型桌面机械臂
产品型号:DOBOT-MG400
官网连接:http://dobot.cn/products/desktop-four-axis/mg400.html
资料

方案
DOBOT为MG400提供了标准化的MODBUS TCP接口,对它们的设备进行远程控制,所以在Fox-Edge之中,只需要配置MODBUS模板,即可实现接入。
对于标准的MODBUS接口,灵狐提供了通用的MODBUS解码器,作为通用引擎,使用户通过CSV模板,即可跟Fox-Edge集成的能力。
灵狐在跟DOBOT技术交流后,获得了其提供信息,进行了模板配置。
灵狐通过DOBOT MG400的集成过程,演示如何跟厂商获得MODBUS协议文档后,即可通过定义CSV文件,接入该厂商的MODBUS设备的能力。
其他厂家的MODBUS设备,基本上都可以通过该方案来进行集成。
如果遇到某些厂家的设备是非标准化的MODBUS协议,还可以通过写解码器的方案来集成。具体可以参考《zs-sht30-1t-1h》篇的方案。
模板
- dobot-mg400
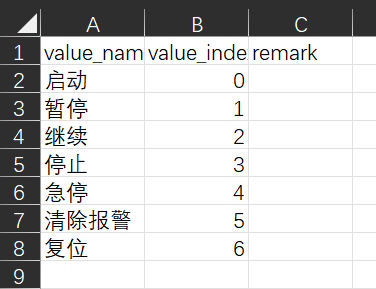
1.线圈定义
文档定义

模板配置
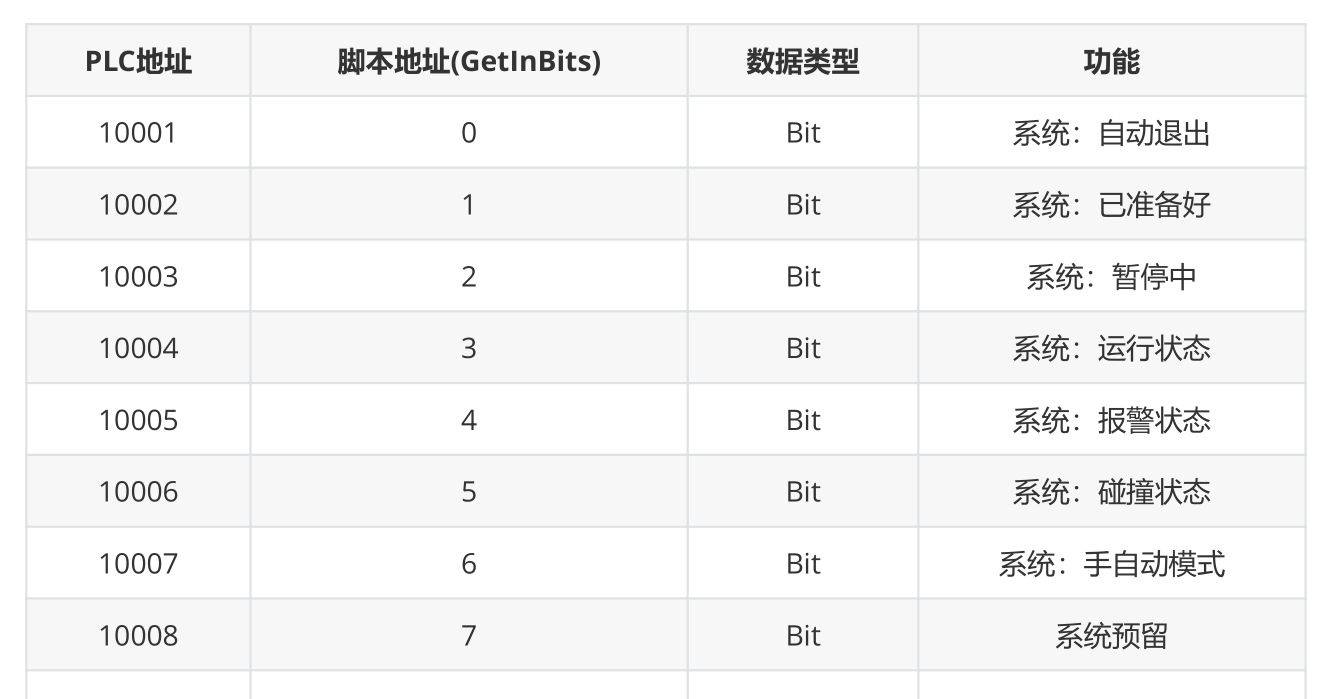
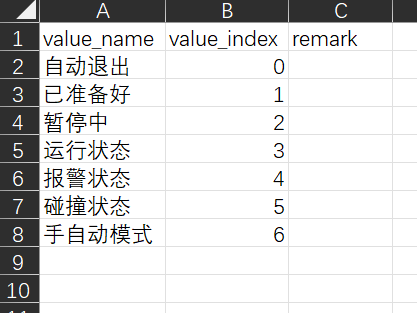
2.离散输入定义
文档定义
模板配置
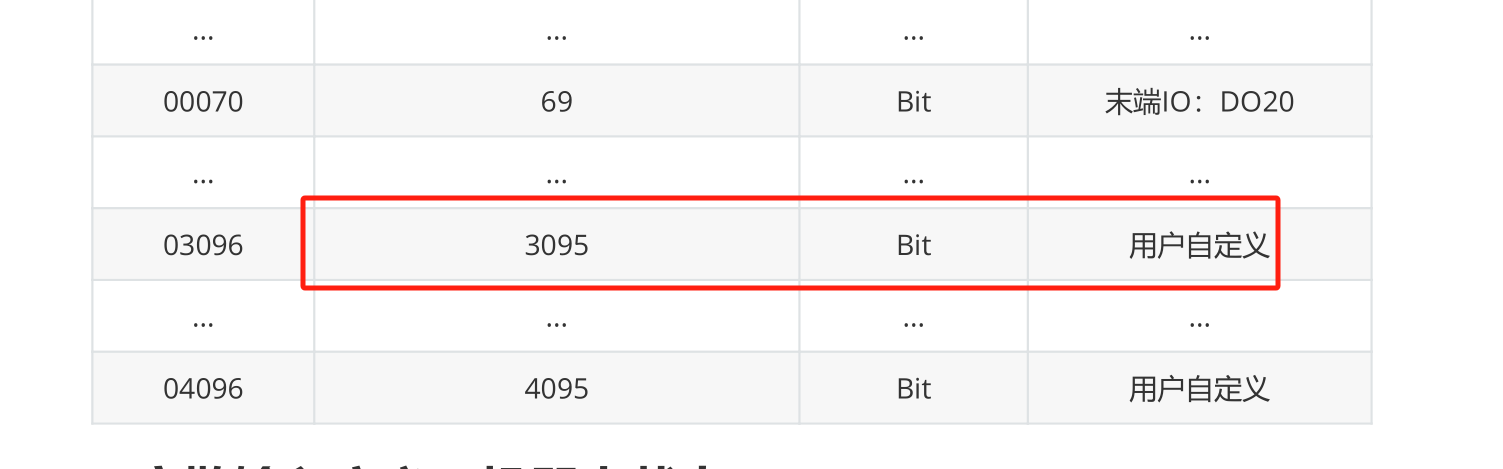
3.保持寄存器定义
文档定义
模板配置

测试
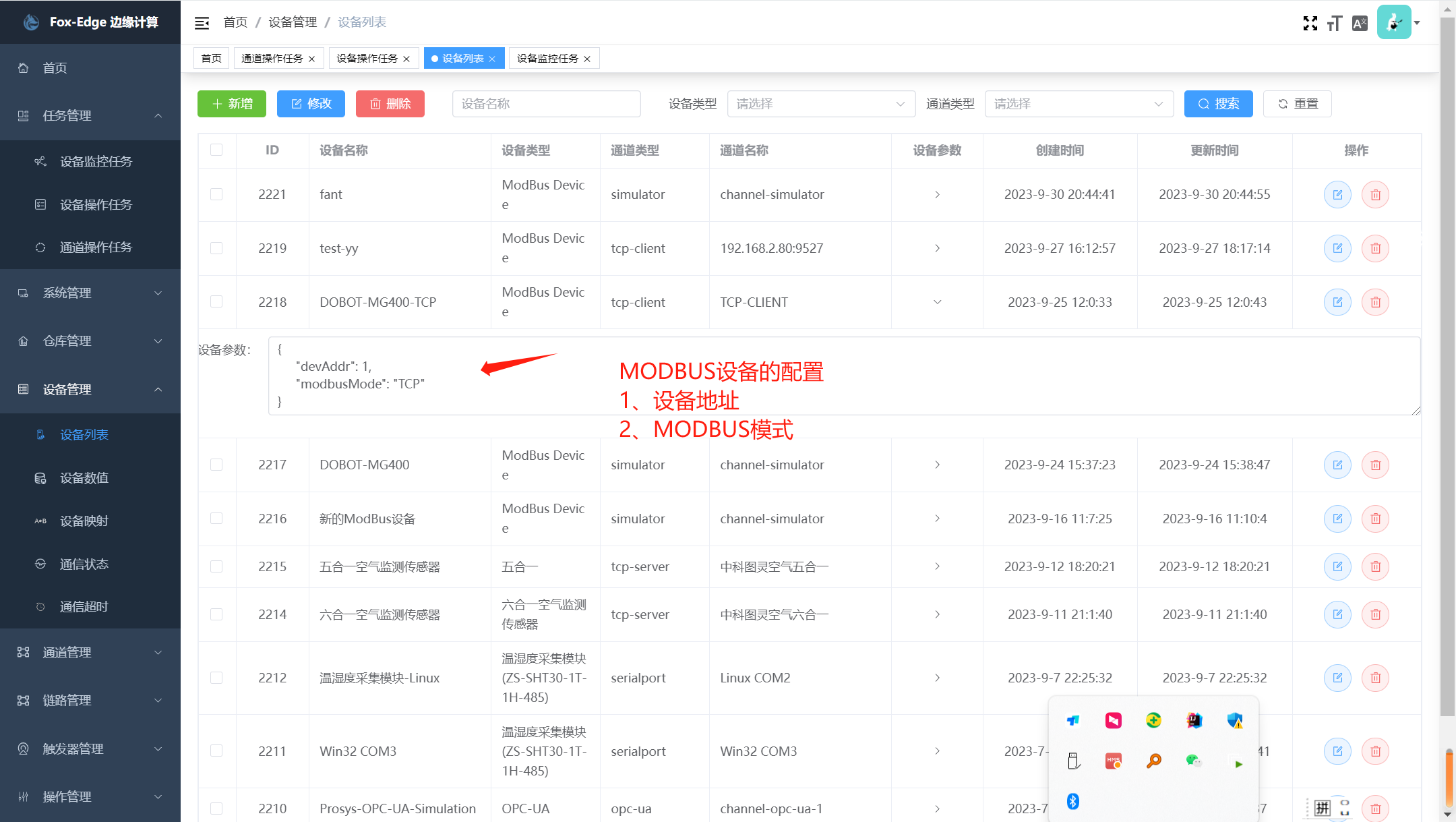
1.设备配置
{
"devAddr": 1,
"modbusMode": "TCP"
}
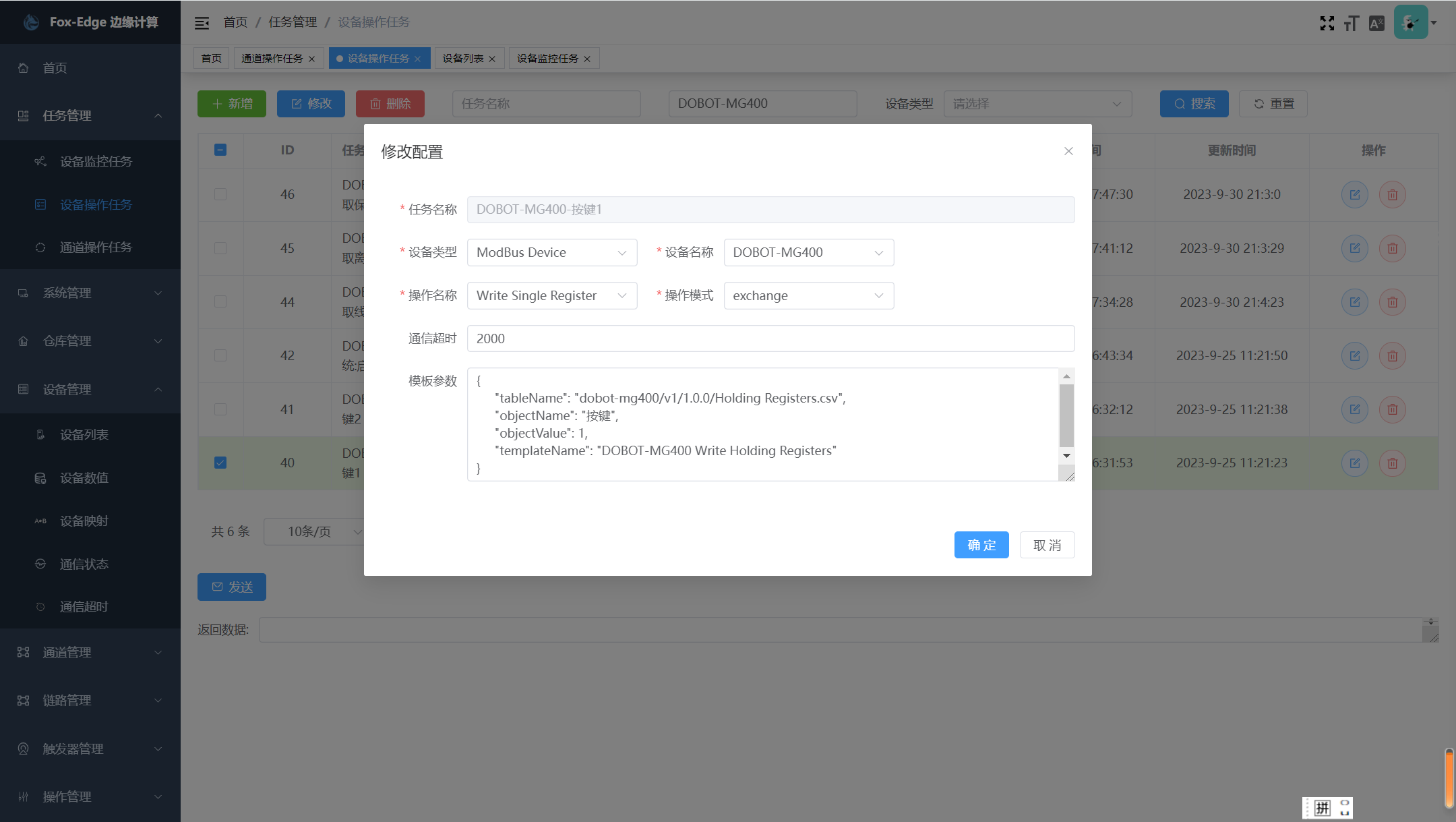
2.操作任务:
DOBOT-MG400-按键1
[
{
"param": {
"tableName": "dobot-mg400/v1/1.0.0/Holding Registers.csv",
"objectName": "按键",
"objectValue": 1,
"templateName": "DOBOT-MG400 Write Holding Registers"
},
"timeout": 2000,
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"operateMode": "exchange",
"operateName": "Write Single Register"
}
]
-
配置参数
-
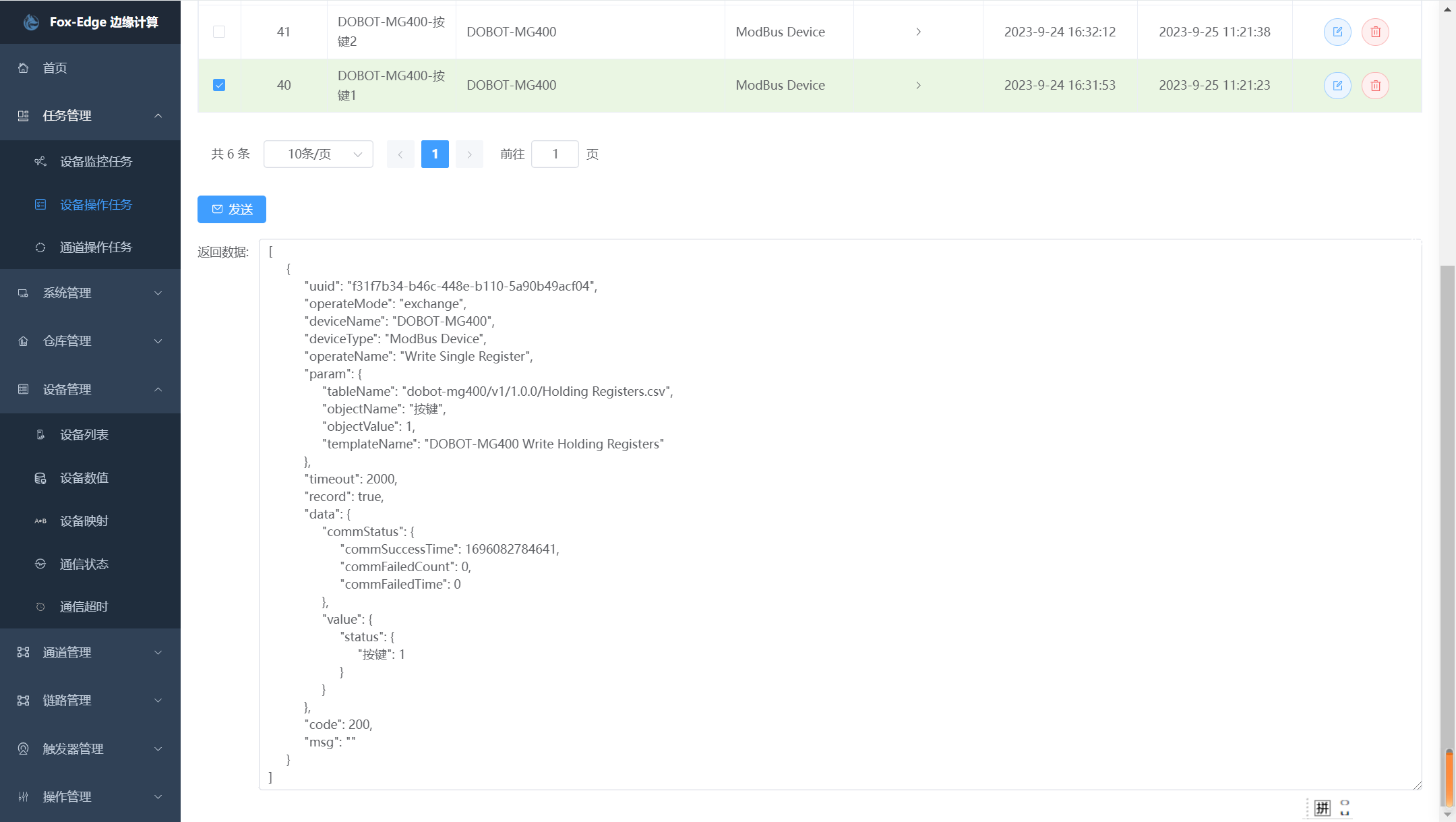
操作返回结果
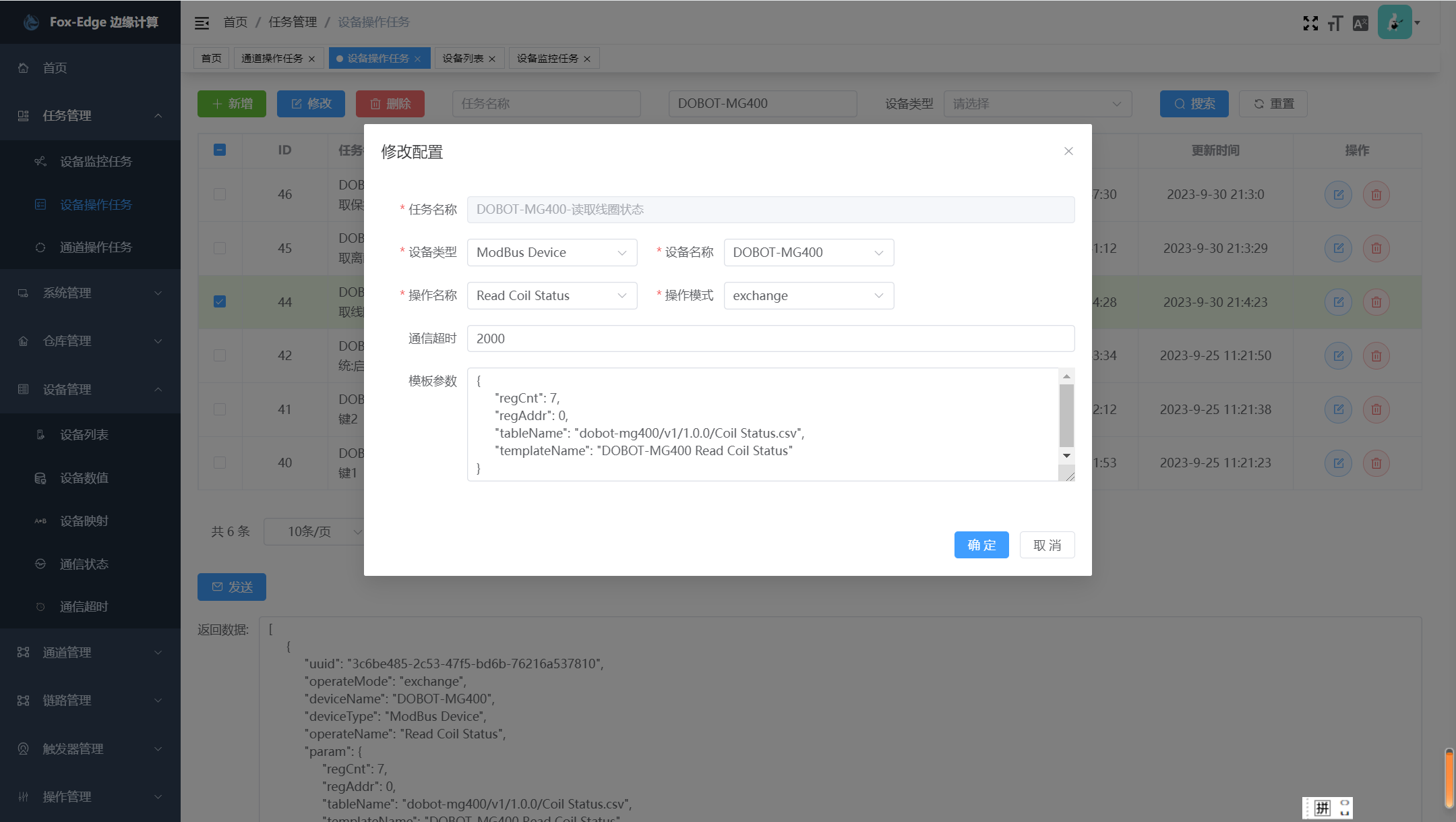
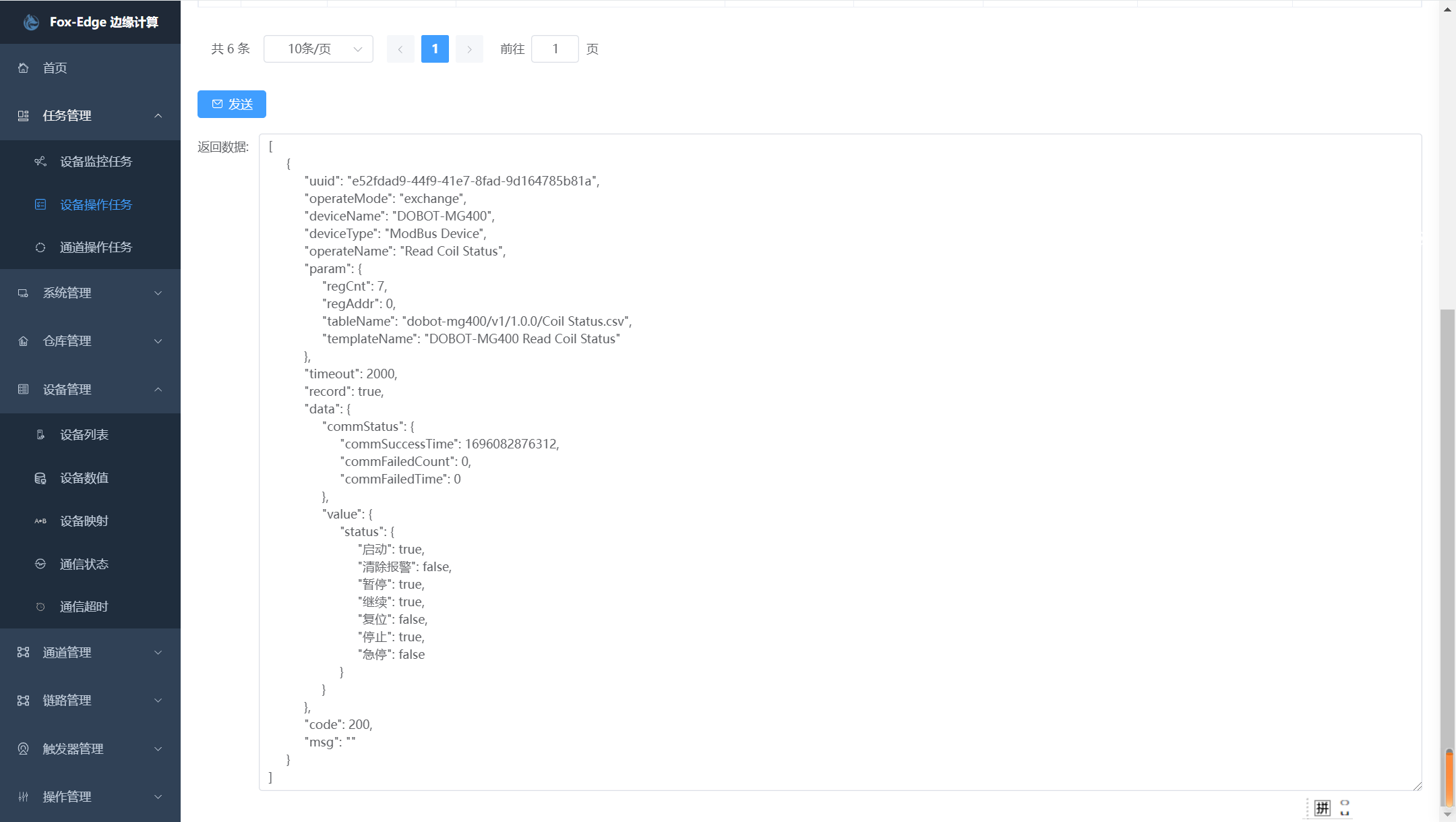
DOBOT-MG400-读取线圈状态
[
{
"operateMode": "exchange",
"operateName": "Read Coil Status",
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"timeout": 2000,
"param": {
"regCnt": 7,
"regAddr": 0,
"tableName": "dobot-mg400/v1/1.0.0/Coil Status.csv",
"templateName": "DOBOT-MG400 Read Coil Status"
}
}
]
-
配置参数
-
操作返回结果
其他配置
- DOBOT-MG400-按键1
[
{
"param": {
"tableName": "dobot-mg400/v1/1.0.0/Holding Registers.csv",
"objectName": "按键",
"objectValue": 1,
"templateName": "DOBOT-MG400 Write Holding Registers"
},
"timeout": 2000,
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"operateMode": "exchange",
"operateName": "Write Single Register"
}
]
- DOBOT-MG400-按键2
[
{
"param": {
"tableName": "dobot-mg400/v1/1.0.0/Holding Registers.csv",
"objectName": "按键",
"objectValue": 2,
"templateName": "DOBOT-MG400 Write Holding Registers"
},
"timeout": 2000,
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"operateMode": "exchange",
"operateName": "Write Single Register"
}
]
- DOBOT-MG400-系统:启动
[
{
"param": {
"tableName": "dobot-mg400/v1/1.0.0/Coil Status.csv",
"objectName": "启动",
"objectValue": true,
"templateName": "DOBOT-MG400 Write Coil Status"
},
"timeout": 2000,
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"operateMode": "exchange",
"operateName": "Write Single Status"
}
]
- DOBOT-MG400-读取线圈状态
[
{
"operateMode": "exchange",
"operateName": "Read Coil Status",
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"timeout": 2000,
"param": {
"regCnt": 7,
"regAddr": 0,
"tableName": "dobot-mg400/v1/1.0.0/Coil Status.csv",
"templateName": "DOBOT-MG400 Read Coil Status"
}
}
]
- DOBOT-MG400-读取离散输入状态
[
{
"operateMode": "exchange",
"operateName": "Read Discrete Inputs Status",
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"timeout": 2000,
"param": {
"regCnt": 7,
"regAddr": 0,
"tableName": "dobot-mg400/v1/1.0.0/Discrete Inputs Status.csv",
"templateName": "DOBOT-MG400 Discrete Inputs Status"
}
}
]
- DOBOT-MG400-读取保持寄存器
[
{
"operateMode": "exchange",
"operateName": "Read Holding Register",
"deviceName": "DOBOT-MG400",
"deviceType": "ModBus Device",
"timeout": 2000,
"param": {
"regCnt": 1,
"regAddr": 3095,
"tableName": "dobot-mg400/v1/1.0.0/Holding Registers.csv",
"templateName": "DOBOT-MG400 Read Holding Register"
}
}
]